 |
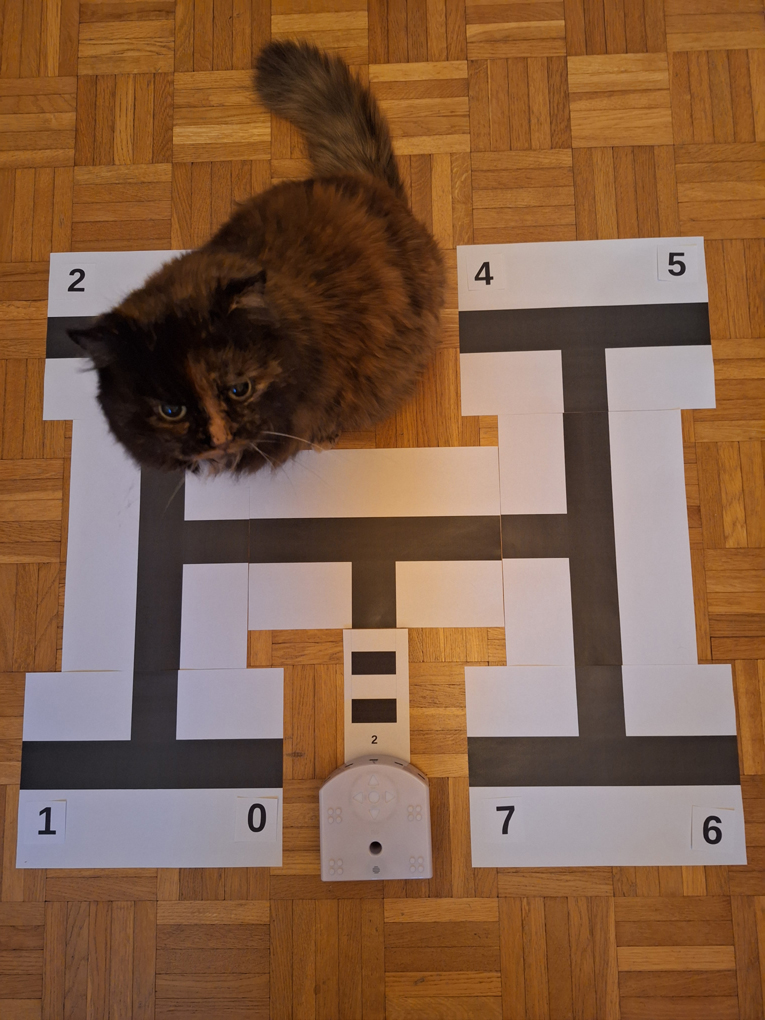
- Le robot utilise ses capteurs au sol pour reconnaître un code-barres
simplifié composé d'une séquence de barres noires
et blanches représentant un code binaire. La première
barre est toujours noire et sert à savoir où commence
le code-barres, formé des 3 barres suivantes.
- Le robot enregistre ce code binaire dans l'anneau de LED. Ce code
de 3 bits indique où le robot doit se rendre (un chiffre entre
0 et 7).
- La piste est composée de 7 intersections en T, dont trois doivent
être franchies par le robot pour atteindre sa destination.
- Chaque bit du code binaire (blanc = 0, noir = 1) détermine
si le robot tourne à gauche (0) ou à droite (1) à
l'une des intersections en T.
|
 Durée : 5 x 45 minutes
Durée : 5 x 45 minutes

 Didier
Müller, 30.1.26
Didier
Müller, 30.1.26

{kind=link}